Back in 1999, as a procrastination exercise while working on my Ph.D. in physics at UC Davis, I spent a couple hours on a Friday night writing out a fairly ineloquent form of the Standard Model Lagrangian density. I unpacked Appendix E in Diagrammatica by Nobel Laureate Martinus Veltman and complied it into one equation, making the pdf and LaTeX files accessible on my old website.
Since that time, this form of the Standard Model Lagrangian density has received some attention in Symmetry Magazine, TED (Brian Cox, “CERN’s Supercollider”), Wikipedia, and PBS Space Time (“The Equation That Explains (Nearly) Everything!”), amongst other places including artwork (by James De Villiers). Recently, Don Lincoln at Fermilab has also highlighted it on his popular YouTube channel.
Since 2006, I’ve been a professor of physics at Cal Poly, San Luis Obispo and, since I haven’t been at UC Davis for a while, and don’t have easy edit access to that content on my old site, I’m making the files available here on my personal page. This includes some long overdue corrections. Only the pdfs are available below, but I will make the LaTeX file available soon. Thanks to the many people who have contacted me over the past 25 years to provide feedback and discussion!
In June of 2022, as the Chair of the Academic Senate at Cal Poly, I was given the opportunity to deliver remarks at Cal Poly’s 2022 spring graduation on behalf of the faculty for each of the six college ceremonies. Since serving in this role starting in July of 2020, I’ve really enjoyed giving graduation speeches during both Fall and Spring commencements.
The Chair of the Academic Senate also has the honor of marching with the ceremonial Mace at the head of the processional and recessional. The Mustang News wrote a nice article with a section summarizing the history of the Mace at Cal Poly. The current mace was designed and created by Professor Emeritus Crissa Hewitt in 2001. The commencement pamphlet states “The tradition of the academic mace dates from the Middle Ages when two ancient instruments, the royal scepter and the battle mace, were combined to form a symbol of the authority of the rector of the university.” In my own mind, while I wield it, I imagine it to be less a symbol of authority, but rather a symbol representing the faculty defense of, and commitment to, seeking Truth.
For several of the ceremonies, I was also given the honor of distributing the graduation participation certificates to the students as their names were called (they don’t give the diploma’s out at commencement). It was really an amazing experience to see each student’s face as they basked in the joy of their special moment.
Me with the ceremonial academic Mace just before the December 2021 commencement.
While crafting my remarks, my goal was to put the graduate’s pragmatic educational experience into a bigger picture while philosophically zooming in from the cosmological to the neurological to the subatomic. I used a quote from Neil Peart (from the song Time Stand Still) and some science inspired by Carl Sagan. I also drew from mindfulness meditation traditions while sprinkling in a little stoic philosophy.
My remarks are only about 3 minutes long from when the clip starts. This video is part of the full Cal Poly College and Science and Math ceremony, which was on Sunday, June 12, 2022 at about 12:30 (lasting about 2 hours). The sound isn’t great, so you might have to turn it up. Below the video on this page is the text of the remarks.
I’m Tom Gutierrez, Chair of the Academic Senate at Cal Poly and Professor of Physics.
Let’s reflect a little on how you ended up here today.
Most of the electrons in your body, which mediate the everyday chemistry and biology we so know and love, were witness to the big bang over 13 billion years ago.
The heavy nuclei in your body, giving you most of your mass and keeping those electrons bound in their quantum haze, were forged at the center of stars, in supernova explosions, or in neutron star collisions billions of years ago.
As a former plasma of quarks and leptons, subject to fickle quantum fluctuations, you’ve come a long way since those early days! Your matter has precipitated, emerged, and evolved against all odds from the beginning of time into you — the sentient creature sitting here in this moment.
You are an entity who has a wetware neural network so powerful in its skull, it can learn, it can ask questions, and has the potential to Understand the nature of humanity and the universe that birthed it. As Carl Sagan said, “We are a way for the universe to know itself.”
Drawing inward and bringing ourselves into this moment, on behalf of Cal Poly’s Academic Senate and our faculty, I would like to congratulate all of our graduates! The faculty- student relationship is profoundly special, and we will continue to support you in pursuit of your professional and personal aspirations however we can. Faculty worked tirelessly to foster your content mastery and also expose you to a balance of breadth and depth across the curriculum. One goal was to create a space where you learned how to learn. I hoped this helped you develop the skills necessary to understand your humanity, learn about and apply the laws of nature, and to use the wetware in your skull to nudge the universe along in its journey to know itself.
I’d like to leave you with a quote from Neil Peart on the importance of living in the moment:
Time stand still I’m not looking back But I want to look around me now Time stands still See more of the people And the places that surround me now Time stands still Freeze this moment A little bit longer Make each sensation A little bit stronger [because] Experience slips away
Looking forward, I wish you tranquility, happiness, and growth opportunities into the future! And stay connected to your cosmological roots. Again, congratulations!
These are the official responses to the letter I submitted on behalf of members of the San Luis Obispo (SLO), California community regarding safety concerns along the Bob Jones Trail in SLO. I am very appreciative of their thoughtful, clear, and timely responses. The original letter can be found in an earlier post.
Second Response from the Assistant City Manager Stanwyck
Friday, October 16, 2020
Good morning, As a follow-up to the previous email below, we wanted to send you additional information to ensure that residents are aware of what is occurring in their neighborhood. This week, the City coordinated an effort to provide a services forum with local government agencies and non-profit service organizations to provide information and direction to the homeless populations on available service resource programs. The flyer attached outlines the different services that are available.
Thank you for your patience and for supporting the City’s efforts to address these challenging and significant health and safety concerns.
Shelly Stanwyck Assistant City Manager Community Services City Administration 919 palm street, San Luis Obispo, CA 93401-3934 Esstanwyck@slocity.org T 805.781.7294 slocity.org
Dear Thomas, Thank you for your kind words and your clear message regarding the Bob Jones Trail, the encampments and behavior on the trail.
I have been in constant communication with city staff trying to learn what we can do to help those who are unhoused get to services and housing that they need, cleaning the encampment areas for public health and safety, fire concerns and managing the whole city’s COVID-19 spread. The staff have been working closely with the County, who manages many of the services necessary for the unhoused, as well as with CAPSLO and other services. I know that we will see some action very soon.
Mr. Gutierrez, We appreciate the opportunity to let you know the Police and Fire Departments hear your concerns over the fires at the homeless camps throughout the community. We are and have been actively working, with the other City Departments, towards a solution. We want to avoid any event in our city like the tragic events affecting so many communities throughout our state.
From the Police Department’s perspective, they have had their Community Action Team out patrolling the creek beds to contact and advise the homeless population of the dangers of open fires and the consequences for having them. For the past several weeks, their leadership have directed night watch patrol officers to make frequent passes through the area of the Bob Jones Trail south of Prado to LOVR and take appropriate enforcement action. We also made our Special Enforcement Team aware of the issue and they have plans to help the CAT team and Park Rangers address this issue.
The Fire Department has also actively been working towards a solution. Recently there have been several calls for service behind the Silver City Mobile Home Park on South Higuera where either SLO Fire Engine companies or the working Battalion Chief has responded. Most are reported as smoke checks, which dispatches an engine company to investigate. We have been successful in gaining cooperation in putting out any campfires and educating those responsible, however it remains an ongoing challenge.
I have attached the letter you provided me for Chief Smith and SLOPD Leadership to review.
As indicated in my previous reply, if you see or suspect there is an active fire or see smoke in any area of the creek bed you can report it us either by calling our non-emergency line at (805) 781-7312 or in the case of an emergency 911. You can also reach out to the neighborhood officer for the affected area through our department’s website https://www.slocity.org/government/department-directory/police-department and clicking on the Neighborhood Officer Program link.
Good evening, Thank you for your recent email alerting the City to your concerns about your observations and concerns about the fires, trash, illegal encampments, and health and safety issues near or on the Bob Jones Trail.
We as a City share your concerns and all City Departments are coordinating a response to this challenging and unfortunate situation. We are balancing multiple challenges to coordinate this effort. During these COVID times the parameters in which the City can respond are very prescribed and we have many service providers we need to coordinate with to address this issue. Unfortunately, cities do not receive funding for social services (which includes mental health and homelessness related services) counties do. Our City spends over one million dollars a year of general fund monies to support homeless related services ranging from the Prado Day Center to the cleanup of illegal encampments. Longer term, we are working actively with other cities and the County in our region to develop a more regional approach as the State and CDC have further limited what can be done during these COVID times.
As soon as we know our schedule for addressing this issue we will let you know so that residents are aware of what is occurring in their neighborhood.
Thank you for your patience and for supporting the City’s efforts to address these challenging and significant health and safety concerns.
Shelly Stanwyck Assistant City Manager Community Services City Administration 919 palm street, San Luis Obispo, CA 93401-3934 E sstanwyck@slocity.org T 805.781.7294 slocity.org
I sent the letter below, with 328 signatories, on Sunday October 4, 2020 to: the San Luis Obispo (SLO, California) City Council, the Community Action Team (CAT), Police Captain Smith, Fire Chief Aggson, the city rangers, the City Biologist, County District 3 office, The Tribune, and The New Times. Note the maps and references after the (328) signatures. Thank you to all who supported this effort.
Dear Mayor Harmon, SLO City Council, District 3 Leadership, and other SLO City Leaders,
Thank you for all the work you do to make this city an amazing place to live and work, particularly during these trying times. However, please see the attached letter expressing extreme concern regarding ongoing unsafe behavior and unregulated camping on and near the Bob Jones Trail along the 101 in San Luis Obispo. The 328 signatories of this letter represent community members in SLO nearest the Bob Jones Trail from the Silver City Community, the Creekside Community, the Meadows Subdivision, the Los Verdes Communities, and residences along South Higuera from Prado to LOVR as well as other supporters throughout the city.
Full Letter
Dear Mayor Harmon, SLO City Council, District 3 Leadership, and other SLO City Leaders,
We are writing to you to express extreme concern regarding ongoing unsafe behavior and unregulated camping on and near the Bob Jones Trail (BJT) along the 101 in San Luis Obispo (SLO). The camps and the associated vandalism, loitering, fires, violence, and dilapidation all along the BJT from Prado to LOVR have made the BJT unusable for its intended recreational purposes and have made that space manifestly unsafe. While we acknowledge the heartbreaking struggles of the homeless and, in particular, the humanitarian crisis facing California and the nation in this context, we are very concerned about the systematic unregulated overnight camping along the BJT and the associated camp or cooking fires, consistent disruptive or violent confrontations at all hours, trespassing onto private land, and unsanitary conditions there. The impact this behavior has on public safety and health raise extremely distressing concerns that negatively impact the lives of hundreds, if not thousands, of SLO citizens living near that region, including the health and safety of the homeless members of our community. Allowing unregulated camping in this area is neither a compassionate nor sustainable solution to the problem of homelessness. To allow these conditions to persist is creating a ripe environment that will lead to serious disasters such as fire or severe injury.
Indeed, of dire concern are routine unregulated cooking or campfires, both day and night, on the BJT and the tree line near the creek. These create a persistent fire danger to the neighborhoods and businesses along South Higuera. This is an issue that has generated considerable anxiety and alarm in the wake of major fires throughout California as well as fires in our own county and town. This includes fires in the Salinas Riverbed caused by camps in Paso Robles and recent vegetation fires along the BJT itself behind the Meadows Subdivision, Creekside, and Silver City.
Signage at the Prado trailhead, as reinforced by SLO MC 12.22, indicates that there is no overnight camping, no campfires, and that people must stay on designated trails. Nevertheless, there remains a very large number of people systematically violating these directives on a daily basis: camping overnight, lighting camp or cooking fires, loitering, leaving excessive trash and waste, not respecting preservation efforts along the creek and greenbelt, and trespassing into local neighborhoods off designated trails. Semi-permanent encampments have become commonplace along the main BJT, in the open spaces, and tucked in along the tree line and creek nearest the neighborhoods. These present a huge public health risk associated with excessive garbage, drug paraphernalia, and debris resulting from extreme human interference. In addition to public safety, these activities, and those like them throughout our city, severely undermine environmental preservation efforts in these protected open space greenbelt regions along the creek both near the BJT and throughout town.
The discovery of an armed individual living on the creek near the Elks lodge in July 2020 and an attempted murder and fire behind the Creekside community in September 2020 have greatly increased concerns about security along the creek. Furthermore, at all hours, we regularly observe and encounter individuals coming up from the creek into our neighborhoods on undesignated pathways, and vice versa, often trespassing on private property. These events naturally introduce serious concerns for everyone living and doing business near the BJT and creek.
We appreciate there are no easy solutions to this and that the issues we highlight are only a part of a systematic problem across our community. Our intention is not to demonize the homeless nor to assert that homelessness is illegal. Rather, we are demanding that you find proactive, compassionate solutions that empower the appropriate agencies with the resources to address the concerns we have outlined. For example, creating a managed and patrolled designated camping area near existing shelter facilities and regularly patrolling and enforcing SLO MC 12.22 in the BJT area would be a start.
The 328 signatories of this letter represent community members in SLO nearest the BJT from the Silver City Community, the Creekside Community, the Meadows Subdivision, and the Los Verdes Communities; we also include businesses and residences along South Higuera from Prado to LOVR as well as other supporters throughout the city (see attached map after signatures). We insist that our longstanding concerns about this threat to public health, safety, and environmental preservation are no longer ignored by the city and that tangible action is taken immediately to alleviate the situation.
Sincerely, the undersigned members of the community,
1. Thomas Gutierrez, Meadows Subdivision, San Luis Obispo
2. Krista Elsey, Silver City, San Luis Obispo
3. James Wright, Silver City, San Luis Obispo
4. Karilyn Taylor, San Luis Obispo
5. Rob Schuberg, Meadows Subdivision, San Luis Obispo
6. Laura Schuberg, Meadows Subdivision, San Luis Obispo
7. Tonia Harrell, Creekside, San Luis Obispo
8. Keri Cartwright, Creekside, San Luis Obispo
9. Alex Haga, Meadows Subdivision, San Luis Obispo
10. Kim Romero, Creekside, San Luis Obispo
11. Arlene Yost, San Luis Obispo
12. Carmi Adams, Meadows Subdivision, San Luis Obispo
13. Susan Gollnick, Meadows Subdivision, San Luis Obispo
14. Karen Miller, Meadows Subdivision, San Luis Obispo
15. Ronald Ross, San Luis Obispo
16. Russ Gordon, Meadows Subdivision, San Luis Obispo
17. Jeanie Gordon, Meadows Subdivision, San Luis Obispo
18. Pamela Lee, Meadows Subdivision, San Luis Obispo
19. Leslie Thomas, Meadows Subdivision, San Luis Obispo
20. Kathleen Blandini, Silver City, San Luis Obispo
21. Ashley Anthony, Creekside, San Luis Obispo
22. Maggie St Vincent, Meadows Subdivision, San Luis Obispo
23. Louise Matheny, Prado, San Luis Obispo
24. Krista Kiaha, Meadows Subdivision, San Luis Obispo
25. Melissa Fritzen, Silver City, San Luis Obispo
26. Chelsea Ruiz, San Luis Obispo
27. Mark Lacouague, Meadows Subdivision, San Luis Obispo
28. Jennifer Stokes, Meadows Subdivision, San Luis Obispo
29. Cindy Frauenheim, Meadows Subdivision, San Luis Obispo
30. Mark Frauenheim, Meadows Subdivision, San Luis Obispo
31. Shannon Smith, Prado, San Luis Obispo
32. Laurie Hartwell, Meadows Subdivision, San Luis Obispo
33. Jason Green, San Luis Obispo
34. Katie Green, San Luis Obispo
35. Marion Camacho, San Luis Obispo
36. Edward Bowie, Meadows Subdivision, San Luis Obispo
37. Aimee Hoffman, Meadows Subdivision, San Luis Obispo
38. Jory Hoffman, South Higuera, San Luis Obispo
39. John Ozanich, Meadows Subdivision, San Luis Obispo
40. Jennifer Klay, Meadows Subdivision, San Luis Obispo
41. Joni Nelson, Meadows Subdivision, San Luis Obispo
42. Jeff Nelson, Meadows Subdivision, San Luis Obispo
43. Jacob Bryan, South Higuera, San Luis Obispo
44. Patrick Simonsen, Silver City, San Luis Obispo
45. Roger Jump, Meadows Subdivision, San Luis Obispo
46. Cheri Jump, Meadows Subdivision, San Luis Obispo
47. Jack Shoulders, Meadows Subdivision, San Luis Obispo
48. Jenny Karp, Meadows Subdivision, San Luis Obispo
49. Ronald Kiel, Meadows Subdivision, San Luis Obispo
50. Alissa Levanway, Prado, San Luis Obispo
51. Vera Gilpin, Creekside, San Luis Obispo
52. Jim Dunning, San Luis Obispo
53. Stephanie Ronca, San Luis Obispo
54. Kathy Wright, San Luis Obispo
55. David Bunch, Los Verdes, San Luis Obispo
56. Ron Short, Meadows Subdivision, San Luis Obispo
57. Gonzalo Quiroga, San Luis Obispo
58. Patricia Short, Meadows Subdivision, San Luis Obispo
59. Amanda Haynes, San Luis Obispo
60. Randy Bullock, Meadows Subdivision, San Luis Obispo
61. Barbara Bullock, Meadows Subdivision, San Luis Obispo
62. Rochelle Reed Smith, South Higuera, San Luis Obispo
63. Glenda Humphrey, Meadows Subdivision, San Luis Obispo
64. Katrina Ackerman, San Luis Obispo
65. Laurie Hartwell, Meadows Subdivision, San Luis Obispo
66. Forest Joe Humphrey, Meadows Subdivision, San Luis Obispo
67. Christine Carlberg, Los Verdes, San Luis Obispo
68. Dee Cole, Meadows Subdivision, San Luis Obispo
69. Brett Nelson, Meadows Subdivision, San Luis Obispo
70. Douglas Hall, Creekside, San Luis Obispo
71. Lisa Schott, Los Verdes, San Luis Obispo
72. Jennifer Efron, San Luis Obispo
73. Cody Hartwell, Meadows Subdivision, San Luis Obispo
74. Ron Leverett, Los Verdes, San Luis Obispo
75. Bronwyn Rafferty, San Luis Obispo
76. Julie Dyson, South Higuera, San Luis Obispo
77. Norine Gibbons, San Luis Obispo
78. Constance Hasley, San Luis Obispo
79. Luis Valdes, San Luis Obispo
80. Laurie Scott, San Luis Obispo
81. Andrea LeVesque, San Luis Obispo
82. Diana Allen, San Luis Obispo
83. Suzanne Renee, San Luis Obispo
84. Kevin Dixson, San Luis Obispo
85. Jody Vollmer, San Luis Obispo
86. Randolph Krauch, Silver City, San Luis Obispo
87. Marcy Chapin, San Luis Obispo
88. Susan Layous, San Luis Obispo
89. Darlene Trower, San Luis Obispo
90. Kathryn Atkins, South Higuera, San Luis Obispo
91. Kathlynne Lauterback, Silver City, San Luis Obispo
92. Shawn Harper, San Luis Obispo
93. Beth Welch, San Luis Obispo
94. Gordon Edmonds, South Higuera, San Luis Obispo
95. Mary Yungman, San Luis Obispo
96. Crystal J, San Luis Obispo
97. Nadia Adam, South Higuera, San Luis Obispo
98. Bob Teaford, San Luis Obispo
99. Angie Gibson, Meadows Subdivision, San Luis Obispo
100. Mary Yungman, San Luis Obispo
101. Ashley Channer, Prado, San Luis Obispo
102. Janiece Heaviland, South Higuera, San Luis Obispo
103. C.C. McLean, San Luis Obispo
104. Liset Rivera, Meadows Subdivision, San Luis Obispo
105. Michelle Tesoriero, Meadows Subdivision, San Luis Obispo
106. April Mott, Meadows Subdivision, San Luis Obispo
107. Paula Hausman, San Luis Obispo
108. Abram Diaz, Meadows Subdivision, San Luis Obispo
109. Jeanette Kimball, San Luis Obispo
110. Georgia Ritzinger, San Luis Obispo
111. Cecilia Mortela, Los Verdes, San Luis Obispo
112. Gracie Tedone Manderscheid, South Higuera, San Luis Obispo
113. Pam Linney, San Luis Obispo
114. Patricia Flores, South Higuera, San Luis Obispo
115. Teresa Vigil, San Luis Obispo
116. Maya Orth, San Luis Obispo
117. Phillip Hasley, San Luis Obispo
118. Marian Lyon, Silver City, San Luis Obispo
119. Greg Silva, South Higuera, San Luis Obispo
120. Olena Silva, South Higuera, San Luis Obispo
121. Brent Rogers, Meadows Subdivision, San Luis Obispo
122. Luvia Hsu, Meadows Subdivision, San Luis Obispo
123. David Tschoepe, San Luis Obispo
124. Erin Kleeman, San Luis Obispo
125. Nadia Adam, South Higuera, San Luis Obispo
126. Jorge Quiros, Los Verdes, San Luis Obispo
127. Michelle Tesoriero, Meadows Subdivision, San Luis Obispo
128. Jorge Quiros, Los Verdes, San Luis Obispo
129. Lindsay Lepe, San Luis Obispo
130. Rauchelle Hudson, Silver City, San Luis Obispo
131. Brian Espy, South Higuera, San Luis Obispo
132. Barbara LeMoine, Los Verdes, San Luis Obispo
133. Meredith Takken, San Luis Obispo
134. Loraine Ped, Los Verdes, San Luis Obispo
135. Vic Gross, San Luis Obispo
136. Ex Shefter, Meadows Subdivision, San Luis Obispo
137. Louis Romero, Creekside, San Luis Obispo
138. Tammy Arlen, Meadows Subdivision, San Luis Obispo
139. Nathan Smith, Los Verdes, San Luis Obispo
140. Jane Gillen, Prado, San Luis Obispo
141. Allan Hall, San Luis Obispo
142. Diane Pinson, San Luis Obispo
143. Vic Gross, San Luis Obispo
144. Carrie Hartford, Meadows Subdivision, San Luis Obispo
145. William Maguire, San Luis Obispo
146. Manuel Power, San Luis Obispo
147. Cameron Chapman, Prado, San Luis Obispo
148. Madeline Kacsinta, Meadows Subdivision, San Luis Obispo
149. Gina Joehnk, San Luis Obispo
150. Layne Smith, Prado, San Luis Obispo
151. Caleb Cross, San Luis Obispo
152. Charles Margaroli, San Luis Obispo
153. Megan Ventura, San Luis Obispo
154. Jackie Leopold, San Luis Obispo
155. Gina Joehnk, San Luis Obispo
156. Joanna Whitcher, South Higuera, San Luis Obispo
157. John Seidel, Los Verdes, San Luis Obispo
158. Anthony Bozzano, San Luis Obispo
159. Ken Warrick, Silver City, San Luis Obispo
160. Mary Warrick, Silver City, San Luis Obispo
161. Geoffrey Lillich, Prado, San Luis Obispo
162. Dustin Bridgewater, San Luis Obispo
163. Beth James, San Luis Obispo
164. Mary Kaney Holliday, Los Verdes, San Luis Obispo
165. Roger York, San Luis Obispo
166. Jean St.James, San Luis Obispo
167. Ron Yukelson, San Luis Obispo
168. Kim Reed, San Luis Obispo
169. Sherrie Fabricius, San Luis Obispo
170. Ashley Channer, Prado, San Luis Obispo
171. Tony Holiday, Los Verdes, San Luis Obispo
172. Carol Michael, Los Verdes, San Luis Obispo
173. Lindsay Karaelias, Meadows Subdivision, San Luis Obispo
174. Troy Hawkins, Los Verdes, San Luis Obispo
175. Becky Hawkins, Los Verdes, San Luis Obispo
176. Rachel Pickering, San Luis Obispo
177. Ann Mallon, San Luis Obispo
178. Joseph Collins, Los Verdes, San Luis Obispo
179. Peter Olsen, San Luis Obispo
180. Kelley Abbas, Meadows Subdivision, San Luis Obispo
181. Jennifer Hilty, San Luis Obispo
182. Anne Keller, Los Verdes, San Luis Obispo
183. Pamela Lee, Meadows Subdivision, San Luis Obispo
184. Anne keller, San Luis Obispo
185. Jason Barroca, South Higuera, San Luis Obispo
186. Anne Fontenot, San Luis Obispo
187. Jennifer Walters, San Luis Obispo
188. Carolyn Weyel, Meadows Subdivision, San Luis Obispo
189. Gary Weyel, Meadows Subdivision, San Luis Obispo
190. Caleb Cross, San Luis Obispo
191. Darlene Ocampo, South Higuera, San Luis Obispo
192. Christi Nemetz, Prado, San Luis Obispo
193. Gary Nemetz, Meadows Subdivision, San Luis Obispo
194. Logan Hunter, San Luis Obispo
195. Jean Hyduchak, Los Verdes, San Luis Obispo
196. John Hyduchak, Los Verdes, San Luis Obispo
197. Christian Beall, San Luis Obispo
198. Abram Diaz, Meadows Subdivision, San Luis Obispo
199. Haley Murphy, San Luis Obispo
200. Edward Conway, Meadows Subdivision, San Luis Obispo
201. Anouk Novy, Meadows Subdivision, San Luis Obispo
202. Robin Hayward, San Luis Obispo
203. Rachel Brown, San Luis Obispo
204. Deidre Basile, San Luis Obispo
205. Maureen Husum, San Luis Obispo
206. Rilla Betz, San Luis Obispo
207. Jennie Romer, San Luis Obispo
208. Monica Demalleville, San Luis Obispo
209. Sandy Chertok, Meadows Subdivision, San Luis Obispo
210. Nathan Smith, Los Verdes, San Luis Obispo
211. Margarita Rivas, San Luis Obispo
212. Lynne Anderson, San Luis Obispo
213. Sean Cheney, San Luis Obispo
214. Catherine Sheel, San Luis Obispo
215. Heidi Hill, San Luis Obispo
216. Sita Ananth, Los Verdes, San Luis Obispo
217. Michael Berger, San Luis Obispo
218. Jennifer Walters, San Luis Obispo
219. John Mason, Creekside, San Luis Obispo
220. Martha Dubois, Prado, San Luis Obispo
221. Susan Gollnick, Meadows Subdivision, San Luis Obispo
222. Teressa Donati, San Luis Obispo
223. Dan See, San Luis Obispo
224. Son Tran, Creekside, San Luis Obispo
225. Erling Smith, Meadows Subdivision, San Luis Obispo
226. Joseph Donoghue, San Luis Obispo
227. Disbel Mansilla, Prado, San Luis Obispo
228. Tammy Blum, Silver City, San Luis Obispo
229. William Roberts, San Luis Obispo
230. Erling Smith, Meadows Subdivision, San Luis Obispo
231. Carol Roulis, Creekside, San Luis Obispo
232. Sarah Jesernig, Silver City, San Luis Obispo
233. Paul Orton, Meadows Subdivision, San Luis Obispo
234. Catherine Orton, Meadows Subdivision, San Luis Obispo
235. Wendy Knight, San Luis Obispo
236. Shira Simpson, Meadows Subdivision, San Luis Obispo
237. Alissa Levanway, Prado, San Luis Obispo
238. Beverly Bryn, Meadows Subdivision, San Luis Obispo
239. Vicente Del Rio , Los Verdes, San Luis Obispo
240. Katelyn Hunter, San Luis Obispo
241. Scott Hunter, San Luis Obispo
242. Robin Grozan, Silver City, San Luis Obispo
243. Catherine Kleier, Meadows Subdivision, San Luis Obispo
244. Davida Mello, Prado, San Luis Obispo
245. Clayton Miller, Los Verdes, San Luis Obispo
246. Annette Poole, San Luis Obispo
247. Christian Steman, San Luis Obispo
248. Kathy Sallaz, San Luis Obispo
249. April Mott, Meadows Subdivision, San Luis Obispo
250. Helene Finger, San Luis Obispo
251. Caleb Anthony, Creekside, San Luis Obispo
252. Kimberly Cattaneo, Silver City, San Luis Obispo
253. Melissa Lapidus, Meadows Subdivision, San Luis Obispo
254. Carrie Hartford, Meadows Subdivision, San Luis Obispo
255. Warren Neal, San Luis Obispo
256. Sandra Marshall-Eminger, San Luis Obispo
257. Carmi Adams, Meadows Subdivision, San Luis Obispo
258. Gale Damery, Creekside, San Luis Obispo
259. Kristen Landre, San Luis Obispo
260. Mark Frauenheim, Meadows Subdivision, San Luis Obispo
261. Emilie Foster, San Luis Obispo
262. Charles Deeds, Meadows Subdivision, San Luis Obispo
263. Darlene Deeds, Meadows Subdivision, San Luis Obispo
264. Barbara Rosenblatt, San Luis Obispo
265. John Tuttle, San Luis Obispo
266. Lisa Hess, San Luis Obispo
267. Tyler Holley, San Luis Obispo
268. Lorraine Kraker, Meadows Subdivision, San Luis Obispo
269. Robert C. Mott, Meadows Subdivision, San Luis Obispo
270. Ira Nayak, Los Verdes, San Luis Obispo
271. Laurel Jones, Meadows Subdivision, San Luis Obispo
272. Vreeland Jones, Meadows Subdivision, San Luis Obispo
273. Martha Sohacki, Meadows Subdivision, San Luis Obispo
274. Robin Wilson, Meadows Subdivision, San Luis Obispo
275. Dave Wilson, Meadows Subdivision, San Luis Obispo
276. Lorna Grinde, San Luis Obispo
277. Kim Ryan, San Luis Obispo
278. Peggy Dewinter, Los Verdes, San Luis Obispo
279. Dave Wilson, Meadows Subdivision, San Luis Obispo
280. Migeul Sanchez, South Higuera, San Luis Obispo
281. Peggy Dewinter, Los Verdes, San Luis Obispo
282. Chris Clark, South Higuera, San Luis Obispo
283. Brooke Kennedy, San Luis Obispo
284. Christine Moore, Creekside, San Luis Obispo
285. Kristen Sanchez, Creekside, San Luis Obispo
286. Damon Castillo, Los Verdes, San Luis Obispo
287. Connie Anderson, South Higuera, San Luis Obispo
288. Gina Papabeis, South Higuera, San Luis Obispo
289. Mary Ellen Gibson, San Luis Obispo
290. Lorie Norkus, San Luis Obispo
291. Irish Turnage, San Luis Obispo
292. Toby Turnage, San Luis Obispo
293. Pamela Lee, Meadows Subdivision, San Luis Obispo
294. Patricia McCormick, San Luis Obispo
295. Jacqueline Whitesides, San Luis Obispo
296. Janet Tiffin, San Luis Obispo
297. Kristine LaFon, San Luis Obispo
298. Arlene Yost, San Luis Obispo
299. Nicolas Underhill, Los Verdes, San Luis Obispo
300. Eric Lillo, Meadows Subdivision, San Luis Obispo
301. Jennifer Underhill, Los Verdes, San Luis Obispo
302. Daniel Monroe, Los Verdes, San Luis Obispo
303. Candy Bello, Los Verdes, San Luis Obispo
304. Clarence Bello, Los Verdes, San Luis Obispo
305. Mary Harris, Los Verdes, San Luis Obispo
306. Dave Cementina, Meadows Subdivision, San Luis Obispo
307. Sora Kim, Meadows Subdivision, San Luis Obispo
308. Kathryn Curtis, Meadows Subdivision, San Luis Obispo
309. Chuck St Vincent, Meadows Subdivision, San Luis Obispo
310. Eugene Kim, Meadows Subdivision, San Luis Obispo
311. Sue Donaldson, Meadows Subdivision, San Luis Obispo
312. Rosalind Goodin, Los Verdes, San Luis Obispo
313. Janet Kirk, Los Verdes, San Luis Obispo
314. Terre Dunivant, San Luis Obispo
315. Kristen Coyne, Meadows Subdivision, San Luis Obispo
316. Don Wright, Meadows Subdivision, San Luis Obispo
317. Janet Wright, Meadows Subdivision, San Luis Obispo
318. Bobby Boss, Los Verdes, San Luis Obispo
319. Cindy Mayr, San Luis Obispo
320. Elizabeth Mehlschau Potter, Los Verdes, San Luis Obispo
321. Carol Graviano, San Luis Obispo
322. Dave Cementina, Meadows Subdivision, San Luis Obispo
323. Sandra Marshall-Eminger, San Luis Obispo
324. Al Streder, Meadows Subdivision, San Luis Obispo
325. Barb Beckett, South Higuera, San Luis Obispo
326. John Carlberg, Los Verdes, San Luis Obispo
327. Danica Hergenroeder, Los Verdes, San Luis Obispo
328. Christine Carlberg, Los Verdes, San Luis Obispo
Maps
Impacted SLO neighborhoods discussed in the letter.
Example camp map in southern portion of the BJT in SLO, Sept 2020. Camps in the northern part of the BJT toward Prado and further south nearer to the LOVR/101/strawberry field trailhead area are not shown.
Like many universities, Cal Poly, San Luis Obispo (where I work as a physics professor) is deploying a number of diversity and inclusivity initiatives to address problems in these areas on campus, primarily with respect to race. The Cal Poly white paper outlining the initiatives is available here and there is a nice summary by the San Luis Obispo Tribune also available. Initiatives of this kind are particularly pressing for Cal Poly because, amongst the 23 public California State University (CSU) schools, Cal Poly is by far the least diverse CSU campus, as described in this article in the San Luis Obispo Tribune. Cal Poly’s white population fraction far exceeds those of all major public four-year universities in the state, including the highly selective University of California (UC) system.
To compound the problem, Cal Poly also has a history of race-based incidents (Mustang News), including the blackface incident and its fallout in the Spring of 2018 (NY Times). At any other university, these would represent vile and inappropriate behavior, indicative of the ongoing race-based tensions as seen across the country and the world. But, at Cal Poly, the effect is further amplified because, just by raw statistics, the voices of those being attacked are almost completely absent or drowned out.
The big areas being addressed in the various initiatives include 1) transforming campus culture to reduce latent and overt bias, helping Cal Poly become a more welcoming space for everyone, 2) designing outreach programs to highlight educational opportunities at Cal Poly across all demographics in the state, 3) providing more diverse scholarship opportunities for all students who choose to come here, and 4) adjusting admissions procedures to reduce arbitrary financial bias.
Note, race-based admissions criteria are not legal in California because of Proposition 209, so no “quotas” are being met. There is no “reverse discrimination” going on. Indeed, it could be called “de-discrimination” in the sense that it will attempt to remove existing hurdles and to expand upon resources already available. The initiatives represent a near- and long-term strategic effort to transform the demographics of Cal Poly to better reflect those of California, the people served by the CSU system. Again, these efforts are not using race as a criteria, but rather asking “why is Cal Poly so statistically out of line with the rest of the CSU, UCs, and the state itself in terms of its demographics?” There is an obvious systematic bias at Cal Poly that the administration is attempting to rectify. Even if an imperfect work in progress, good on them.
All quite sensible, right? Well, then this happened, as reported by the Mustang News (Cal Poly’s student newspaper):
A prominent member of of the College Republicans at Cal Poly, carefully representing herself as a “Cal Poly student” and “Campus Reform Correspondent” (referring to the organization Campus Reform), appeared on Fox News with the headline “Cal Poly plots to reduce white enrollment.” Her affiliation is noteworthy because she does not identify herself as a member of the College Republicans nor a representative of the university. The topic was covered in other outlets as well, some of which I won’t dignify by linking to them. As of July 17, 2018, the original interview has apparently been scrubbed from the internet (still, one can cobble it together from the internet archive). However, it was about as vapid and fact-free as one might expect based on the headline. Now, in fairness, Fox News did actually retract the piece and even issued an apology. After the interview aired, they contacted Cal Poly and did some fact checking.
What do you know? The goal isn’t to conspire to reduce the number of white students on campus. That’s an embarrassing mischaracterization of the issue. When your campus is 60% white and the rest of the public universities in the state are hovering around 35-40% (approximately the same as the state as a whole), a natural byproduct of fair diversification will likely be to reduce the number of white students.
It is important to recognize a few things. First, a big part of the “reduce white enrollment” narrative is that somehow, to accomplish this diversification, Cal Poly will have to lower its standards. This is pretty insulting. However, Cal Poly’s very high, merit-based admission standards will remain the same — indeed, the standards will likely go up. The new strategies will simply widen the range of qualified applicants across the state and increase competition for the finite number of freshman spots available each fall. If some demographics drop because of it, it will be because they weren’t able to compete on a more level playing field.
For example, the recent adjustment to admissions policy involves eliminating the early admissions deadline, as described in this article in the SLO Tribune. Previous admission deadlines arbitrarily favored families that did not require financial aid. Cal Poly’s early admissions system allowed qualified students, already accepted to Cal Poly, to accept an invitation to attend Cal Poly in the fall, a full year before arriving. However, many notifications for federal financial aid are not distributed until the spring of the year of admission. This permitted students who did not require financial aid to take up spots before more- or equally-qualified students who required financial aid could even decide to accept (based entirely on financial reasons).
The early admissions deadline was certainly implemented in good faith to draw the best students in early with a “sure thing.” However, the unintended consequence was to bias against highly qualified students who could not commit for purely financial reasons. From a statistical point of view, white, upper-middle-class students tend not to require financial aid while students of color tend to require it based on the socio-economic conditions in California. Thus, the otherwise good-intentioned early admissions system was intrinsically biased against highly qualified people of color. By deregulating that arbitrary early deadline, more highly qualified students across a wider demographic (who were already admitted and so met existing high admission criteria) were able to accept. Statistically speaking, this will obviously widen the range of accepted qualified California students and will tend to drive the demographics at Cal Poly to reflect that of California. In short, it is increasing merit-based admission by deregulating an arbitrary government rule that squelched competition. Now, obviously the problems of diversity aren’t just financial and this won’t solve the entire issue. However, finances do play a role and have been partly addressed with this policy adjustment.
After the early admission system was suspended in 2016, the incoming class of 2017 was the most ethnically diverse cohort in 20 years, as described in this article from the Mustang News (although still not in line with other CSUs or UCs). In addition, that cohort had the highest incoming average high school GPA scores (3.95/4.00) at that time in Cal Poly’s history (Cal Poly’s insititional Research reports) and SAT/ACT high average scores were consistent with previous recent years.
In summary, Cal Poly’s ethnic demographic is objectively misaligned with the state and with other universities in the state. This points to some systematic or even pathological biases specific to Cal Poly that need to be addressed. Diversity initiatives at Cal Poly are attempting to identify and remove existing barriers students may face when considering Cal Poly as their school of choice. Cal Poly is not lowering admissions standards. To frame the initiatives as a conspiracy trying to reduce the white student population at Cal Poly at the expense of lowering standards is misinformed and irresponsible — exactly the kind of thing we associate with fake news and propaganda. The assertion is so manifestly ridiculous that it did not meet the standards of Fox News, compelling them to remove the piece from their archives and issue an apology. Ironically, the existence of ignorant entities at Cal Poly who willingly frame the problem in that light is indicative of the very problem the initiatives are trying to address.
This is the second in a two part post where I calculate the size and mass respectively of the Death Star in Episode IV (DS1). Estimating the mass will inform discussion about the power source of the station and other energy considerations.
A “realistic” upper limit for the mass is set if the 60 km volume of DS1 was filled with the densest (real, stable) element currently known. This is osmium with a mass density of 2.2E4 kilograms per cubic meter. This places the mass at 2.5E18 kg with a surface gravity of 0.05g. A filling fraction of 10% would then place a “realistic” estimate of the upper limit at 2.5E17 kg. Other analyses have made similar assessments using futuristic materials with some volume filling-fraction, also putting the mass somewhere around 10^18 kg assuming a radius of 160 km.
In this mass analysis, using information from the available footage from the Battle of Yavin, I find a DS1 mass of roughly 2.8E23 kg, about million times the mass of a “realistic” approximation Any supporting superstructure would be a small perturbation on this number. This implies a surface gravity of an astounding 448g. To account for this, my conclusion is that DS1 has a 40 m radius sphere of (contained) quark-gluon plasma or a 55 m radius quantity of neutronium at its core. Such materials, if converted to useful energy with an efficiency of 0.1%, would be ample to 1) provide the 2.21E32 J/shot of energy required to destroy a planet as well as 2) serve as a power source for sub-light propulsion.
Details
The approach here uses the information available in the schematics shown during the briefing. The briefing displays a simulation of the battle along the trench to the exhaust port. Again, as shown in Part I of this post, the simulation scale is self-consistent with other scales in both the schematic and the actual battle footage. As shown in Figure 1, the proton torpedo is launched into projectile motion only under the influence of gravity. It appears to be at rest with respect to the x-wing as it climbs at an angle of about 25 degrees.
Figure 1
Figure 2
From the previous scale analysis in Part I, the distance from the port, d, and height, h, above the the port can be estimated. They are approximately equal, h = d = 21 meters. The length of the x-wing is L = 12.5 m. After deployment, the trajectory slightly rises and then falls into the exhaust port as shown in Figure 2. A straightforward projectile motion calculation gives the formula for the necessary downward acceleration to follow the trajectory of an object under these conditions
Where t is the launch angle and Vo is the initial horizontal velocity of the projectile. If we assume for simplicity that the angle = 0 degrees and h = d, the formula simplifies to
.
From the surface gravity, the mass of can be obtained, assuming Newtonian gravity,
.
Here G = 1.67E-11 Nm/kg, the gravitational constant. For a bombing run, let’s assume the initial speed of the projectile to be the speed of the x-wing coming down the trench. To estimate the speed, v, of the x-wing, information from the on-board battle computers is used. In Part I, the length of the trench leading to the exhaust port was estimated to be about x = 4.7 kilometers. On the battle computers, the number display coincidentally starts counting down from the range of about 47000 (units not displayed). However, from this connection I will assume that the battle computers are measuring the distance to the launch point in decimeters. From three battle computer approach edits, shown in Clip 1 below, and using the real time length of the different edits, the speed of an x-wing along the trench is estimated to be about 214 meters/second (481 miles/hour). This is close to the cruising speed of a typical airliner — exceptionally fast given the operating conditions, but not unphysical. This gives a realistic 22 seconds for an x-wing to travel down the trench on a bombing run.
Using this speed and the other information, this places the surface gravity of DS1 at about 448 g (where g is the acceleration due to gravity on the surface of the earth). DS1 would have to have a corresponding mass of 2.4E23 kg to be consistent with this.
However, it is clear that considerable liberty was taken in the above analysis and perhaps too much credibility was given to the battle simulation alone, which does not entirely match the dynamics show in the footage of the battle. Upon inspection of the footage, the proton torpedoes are clearly launched with thrust of their own at a speed greater than that of the x-wing. A reasonable estimate might put v (torpedo) to be roughly twice the cruising speed of the x-wing. Moreover, the torpedoes are obviously not launched a mere d = 21 meters from the port (although h = 21 is plausible), rather sufficiently far such that the port is just out of sight in the clip. Finally, the torpedoes enter the port at an awkward angle and appear to be “sucked in.” One might argue that there could be a heat seeking capability in the torpedo. However, this seems unlikely. If this were the case, then it greatly dilutes the narrative of the battle, which strongly indicates not only that the shot was very difficult but that it required the power of the Force to really be successful. Clearly, “heat seeking missiles along with the power of the Force” is a less satisfying message. Indeed, some have speculated that the shot could only have been made by Space Wizards. These scenarios, and other realistic permutations, are in tension with the simulation shown in the briefing. Based on different adjustments of the parameters v (torpedo), h, d, and th, one can tune the value of the surface gravity and mass to be just about anything.
However, if we attempt to be consistent with the battle footage, we might assume again that t=0 degrees while d = 210 m, and v (torpedo) = 2 v (x-wing) for propulsion. The speed of the x-wing can remain the same as before at 214 m/s. Even with this, the surface gravity will be 18g. This still leads to a mass over 10000 times larger than the mass of a realistic superstructure. In this case, a ball of neutronium 18 m in radius could still be contained in the center to account for this mass.
Nevertheless, my analysis is based on the following premise: the simulation indicates that the rebel analysts at least believed, based on the best information available, that a dead drop of a proton torpedo into the port, only under the influence of DS1’s gravity, was at least possible at d = h = 21 meters at the cruising speed of an x-wing flying along the trench under fire nap-of-the-earth. Any dynamics that occurred in real time under battle conditions would ultimately need to be consistent with this.
The large intrinsic surface acceleration may seem problematic (consider tidal forces or other substantial technological complications). However, as demonstrated repeatedly in the Star Wars universe, there already exists exquisite technology to manipulate gravity and create the appropriate artificial gravity conditions to accommodate human activities (e.g. within DS1, the x-wings, etc.) under a very wide range of activities (e.g. acceleration to hyperspace, rapid maneuvering of spacecraft, artificial gravity within spacecraft at arbitrary angles, etc.).
Implications for such a large mass.
One hypothesis that would explain such a large mass would be to assume DS1 had, at its core, a substantial quantity of localized neutrinoium or quark-gluon plasma contained as an energy source. Such a source with high energy density could be used for the purposes of powering a weapon capable of destroying a planet, as an energy source for propulsion, and other support activities. For example, the destiny of neutronium is about 4E17 kilograms per cubic meter and a quark-gluon plasma is about 1E18 kilograms per cubic meter. Specifically, a contained sphere of neutronium at the center of the death star of radius 55 meters would account for the calculated mass and surface gravity of DS1.
It has been estimated that approximately 2.4E32 joules of energy would be required to destroy an earth-sized planet. If 6.7 cubic meters of neutronium (e.g. a sphere of radius 1.88 m) could be converted to useful energy with an efficiency of 0.1%, this would be sufficient to destroy a planet (assuming the supporting technology was in place). This is using the formula
where is the useful energy extracted from a mass with efficiency . The mass is converted to a volume using the density of the material.
By using the work-energy theorem, the energy required to accelerate DS1 to an arbitrary speed can be estimated. Assuming the possibility for relativistic motion, it can be shown (left as an exerise for the reader) that the volume V of fuel of density required to accelerate an object of mass M to a light-speed fraction at efficiency is given by
.
This does not account for the loss of mass as the fuel is used, so represents an upper limit. For example, to accelerate DS1 with M = 2.4E23 kg from rest to 0.1% the speed of light (0.001 c) would require about 296 cubic meters of neutronium (a sphere of radius 4.1 m).
From this, one concludes that the propulsion system may be the largest energy consideration rather than the primary weapon. For example, consider DS1 enters our solar system from hyperspace (whose energetics are not considered here) and found itself near the orbit of mars. It would take two days for it to travel to earth at 0.001 c.
This is the first in a two part post where I calculate the size and mass respectively of the Death Star in Episode IV (DS1). At the end of Part II I will discuss thoughts about the energy source of DS1.
Part I: Size of DS1
Conventional wisdom from multiple sources places the size of DS1 to about 100-160 km in diameter.Based on an analysis of the station’s plans acquired by the Rebels, I estimate that the diameter of DS1 is 60 kilometers, not 100 km to 160 km. To bolster the case, this scale is compared to other scales for self-consistency, such as the width of the trench leading to the exhaust port in the Battle of Yavin. Part II of the post will focus on the mass of DS1 using related methods.
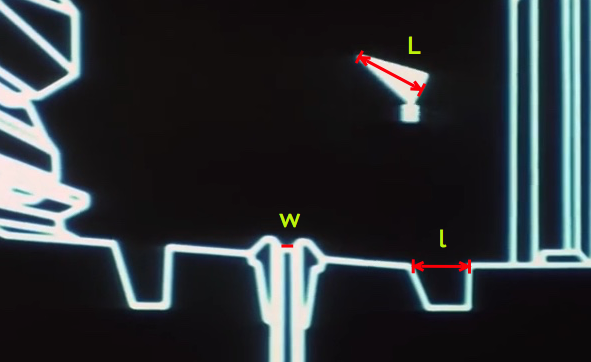
To estimate the size of DS1, I will begin with the given length scale of the exhaust port w = 2 m. This information was provided in the briefing prior to the Battle of Yavin where the battle strategy and DS1 schematics are presented. This scale, when applied to Figure 1, is consistent with the accepted length of an x-wing L = 12.5 m. I assume that the x-wing has an equal wingspan (there does not seem to be consistent values available). I am also assuming that the “small, one-man fighter” referred to in the briefing is an x-wing, not a y-wing. The x-wing is a smaller, newer model than the y-wing and it is natural to take that as the template. The self-consistent length scales of w and L will establish the length calibration for the rest of the analysis.
Figure 1: A close up view of the exhaust port chamber during final phase of the bombing run. The port width is given as w = 2 m. The length of the x-wing is L = 12.5 m. The forward hole, of length l, is then determined to be about 10 m.
From this, I extract the length of the smaller forward hole in Figure 1 to be approximately l = 10 m.
Figure 2: As the plans zoom out, a larger view of the exhaust port chamber of width t = 186 m. The first hole is shown with width l = 10 m. The scale of width l was determined based on information in Figure 1. The width of t was determined based on the scale of l.
Using l as a calibration, this establishes the exhaust port chamber in Figure 2 to be approximately t = 186 m.
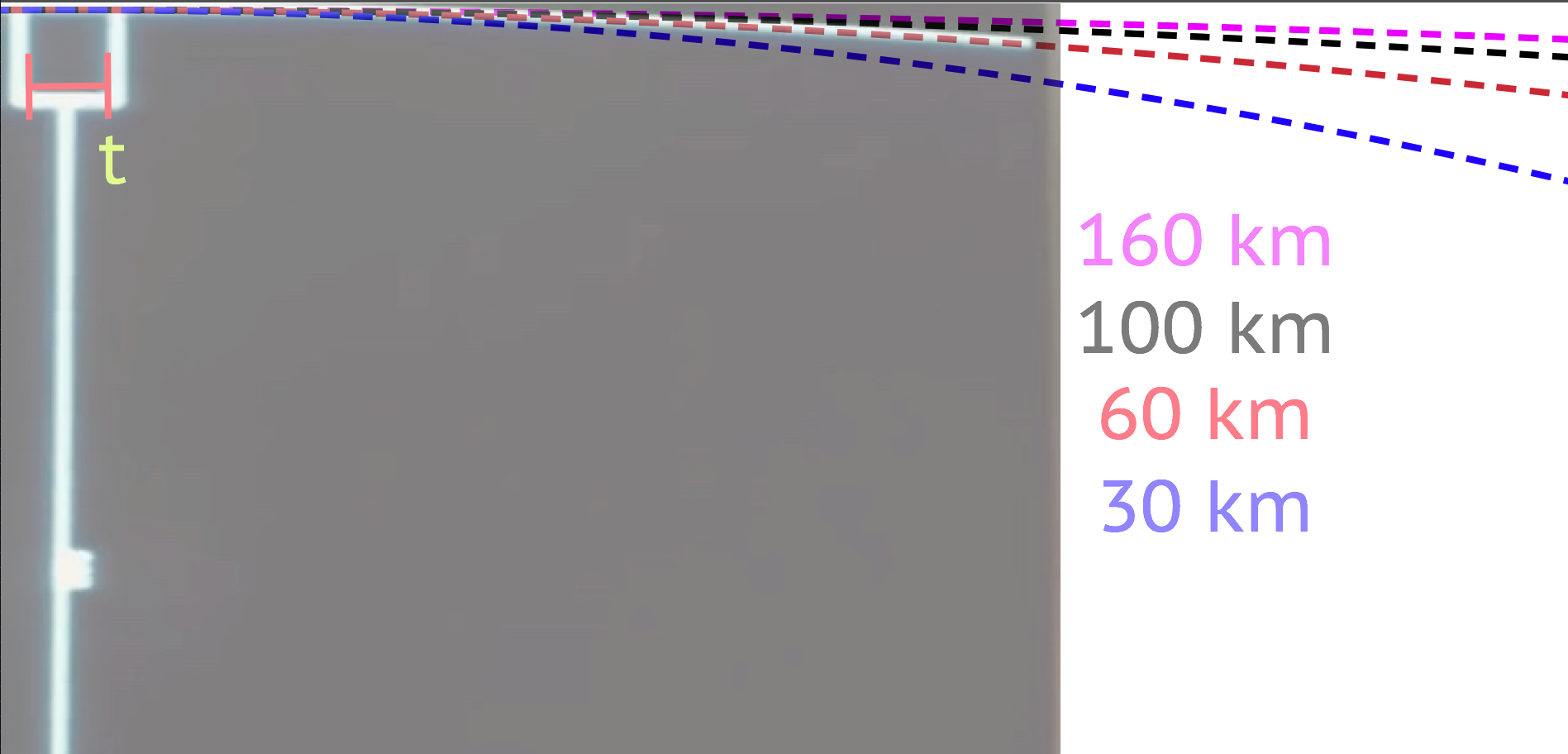
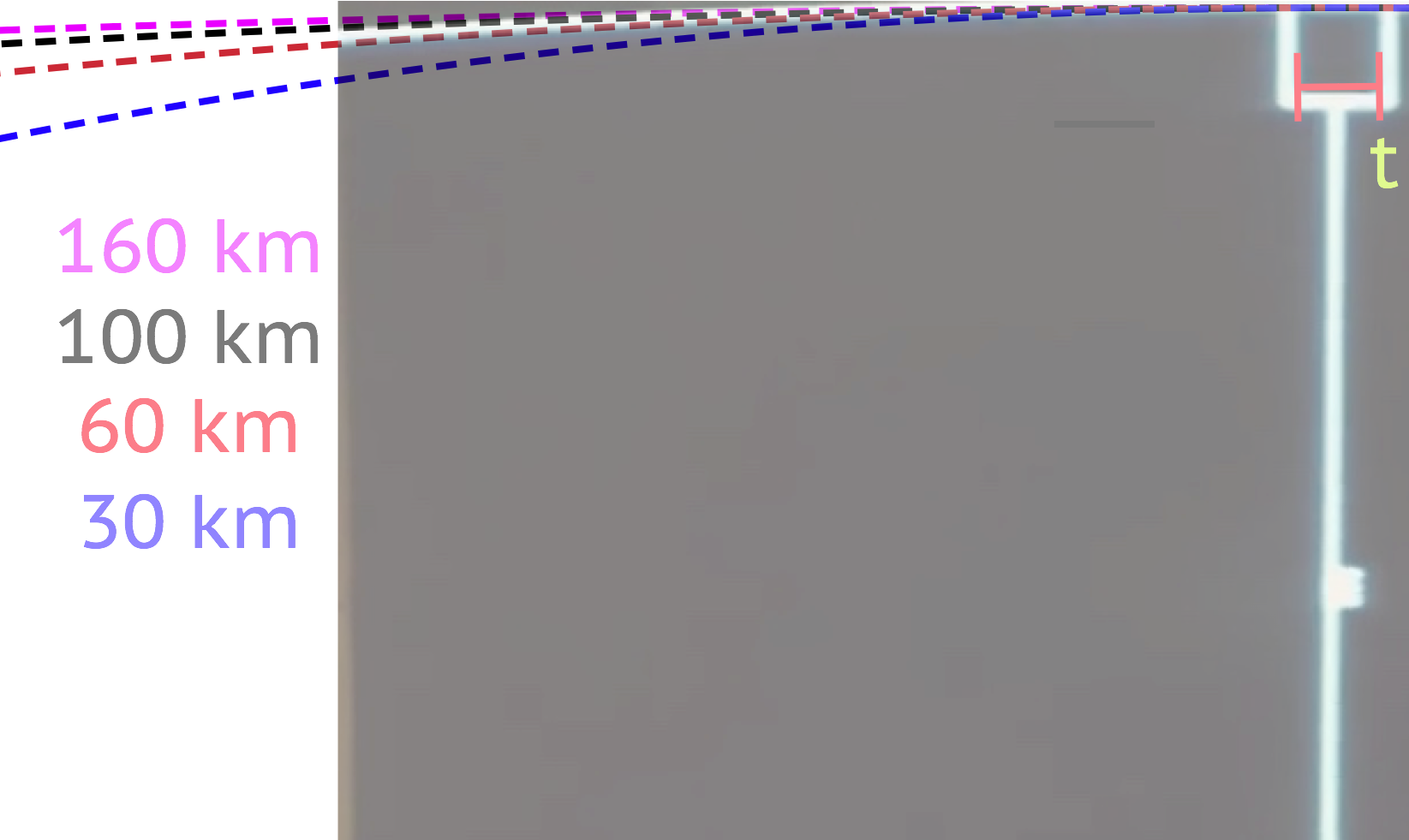
In Figure 3a and Figure 3b, circles of different radii were overlaid on the battle plans until a good match for the radius was established. Care was taken to have the sphere’s osculate the given curvature and to center the radial line down the exhaust conduit. From here, the size of the exhaust port chamber, of width t, was used as a calibration to approximate the diameter of DS1 as D = 60 km (red). Several other circles are show in Figure 3 to demonstrate that this estimation is sensible: 160 km (purple), 100 km (black), and 30 km (blue). It is clear that a diameter of 160 km is definitely not consistent with station’s schematics. A diameter of 100 km is not wildly off, but is clearly systematically large across the range over the given arc length. 30 km is clearly too small.
While a diameter of 60 km may seem modest in comparison to the previously estimated 100 km to 160 km range, an appropriately scaled image of New York City is overlaid in Figure 4 to illustrate the magnitude of this systems in real-world terms; even a sphere of 60 km (red) is an obscenely large space station, considering this is only the diameter — more than adequate to remain consistentwith existing canon. The size of the main ring of the LHC (8.6 km) is overlaid in light blue, also for scale.
Figure 3a (to the right of the exhaust port chamber): As the plans zoom out further, the exhaust port chamber of width t = 186 m is shown with the curvature of DS1 (the square blob is the proton torpedo that has entered the port). The scale of t was determined based on information in Figure 2. Several circles with calibrated diameters based on the scales set in Figures 1 and 2 are shown. The 60 km diameter circle in red is arguably the best match to the curvature. Care was taken to match the point of contact of the circles to a common central location along the radial port.
Figure 3b (to the left of the exhaust port chamber): The same idea as Figure 3a. The 60 km diameter is still arguably the best match, although is a little shy on this side. The 100 km diameter, the next best candidate, is shooting higher than the 60 km is shooting low. Since an exact mathematical fit wasn’t performed, the expected radius is probably a bit higher than 60 km, but significantly lower than 100 km.
Figure 4: A 60 km diameter circle in red (with yellow diameter indicator) shown overlaid on a Google Earth image of the greater New York City region. The blue ring is an overlay of the scale of the Large Hadron Collider at CERN (about 8.5 km in diameter) — note the blue ring is not a scaled representation of the main weapon! The main message here is that a 60 km station, although smaller than the accepted 100-150 km, is still freakin’ HUGE. At this scale, there is only a rather modest indication of the massive urban infrastructure associated with New York City.
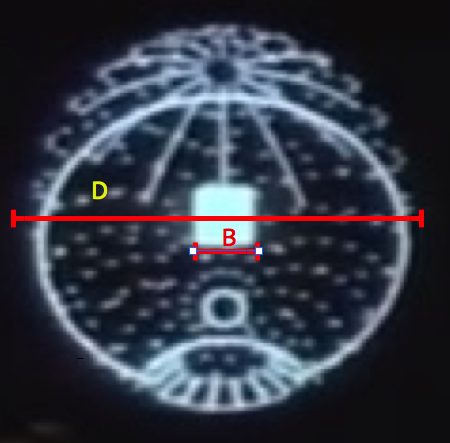
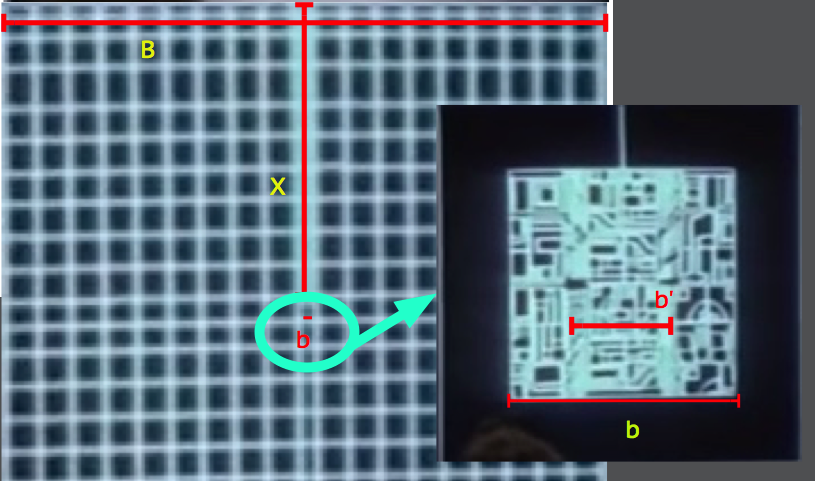
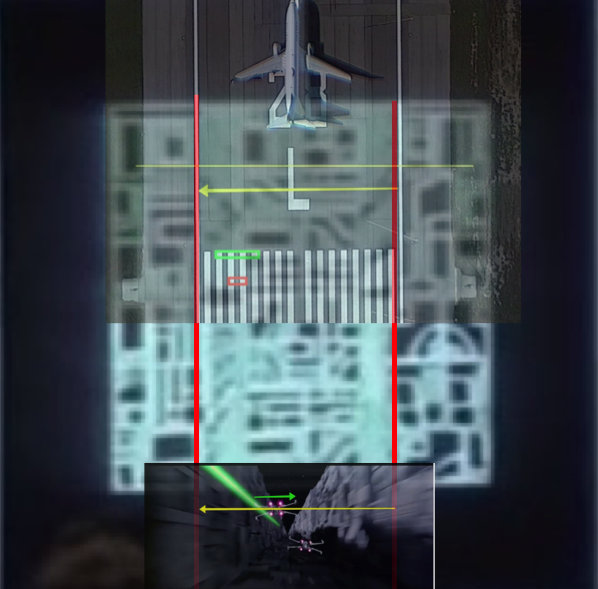
As another check on self-consistency, the diameter D is then used to calibrate the successive zooms on the station schematics, as shown in Figures 5 and 6. The length B = 10 km is the width of the zoom patch from Figure 5, X = 4.7 km is the length of the trench run, and b = 134 m is the width of one trench sector. From Figure 6, the width of the trench is estimated to be b’ = 60 m, able to accommodate roughly five x-wing fighters lined wingtip-to-wingtip. This indicates that the zoom factor is about 1000x in the briefing.
Figure 7 is a busy plot. It overlays several accurately scaled images over the 60 m trench, shown with two parallel red lines, to reinforce plausibility. Starting from the top: an airport runway with a 737 ready for takeoff (wingspan 34 m); a 100 m-wide yellow calibration line; a 60 m-wide yellow calibration line; the widths of an x-wing (green, Wx = 12.5 m, where I’ve assumed the wingspan is about the same as the length — there does not seem to be a consensus online; I’ve seen the value quoted to be 10.9 m, but it isn’t well-sourced) and tie fighter (red, 6.34 m); and a scaled image from footage of two x-wings flying in formation, with a yellow 60 m calibration line as well as a calibrated green arrow placed over the nearer one to indicate 12.5 m. As predicted, about five x-wings could fit across based on the still image. Also from this, the depth of the trench is estimated to also be 60 m. The scales are all quite reasonable and consistent. It is worth noting that if the station were 100 km, the next possible sensible fit to the arc length in Figure 3, the width of the trench would be about 100 m, twice the current scale. This would not be consistent with either the visuals from the battle footage or the airport runway scales.
In short, while there is certainly worthy critique of this work, I argue that, after a reasonably careful analysis of the stolen plans for DS1, all scales paint a self-consistent picture that the diameter of DS1 is very close to 60 km.
Figure 5: A zoom-out of DS1 in the briefing based on the stolen battle plans. D = 60 km is the diameter and B = 10 km is the width of the patch in the region of interest near the exhaust port.
Figure 6: A zoom in in the region of interest patch near the exhaust port channel (see Figure 5) with B = 10 km. the channel itself is about X = 4.7 km long. The width of the channel is about b = 134 m. Inset is a further zoom of the insertion point along the channel. Width of the channel itself is about b’ = 60 m.
Figure 7: A zoom of the insertion point along the channel for the bombing run. Several elements are overplayed for a sense of scale and for consistency comparisons. The red parallel lines represent the left and right edges of the channel. From the top of the figure is a 737 with a wing span of 34 m. The 737 is on a runway (at SFO). Down from the 737 is a yellow line that represents 100 m. This would be the width of the channel if D = 100 km, which is clearly much too large based on the battle plans. The next horizontal yellow arrow is the 60 m width based on the scales assumed with D = 60 m. Next down, embedded in the vertical lines of the runway: a green block representing the width of an x-wing and a red block representing the width of a tie fighter. Finally, at the bottom is a shot from the battle footage. It has been scaled so the edges of the walls match the width of the channel (shown as a horizontal yellow arrow). The width of the near x-wing is shown with a green horizontal arrow, which matches the expected scale of an x-wing.
As an educator, I confront the two questions daily in the context of higher education:
how do students learn?
what is the role of teachers in the learning process?
There is a vast literature on this and entire academic fields of study devoted to these two questions.
Putting aside this ocean of work done by trained professionals, here I’d like to reflect on how I believe I learn new things. It is an ongoing project for me to apply this to my own teaching. However, this isn’t about my teaching style, but a meditation on my own internal modes of learning.
The main bullet points would be:
I have to want to learn and be engaged
I have to have a simple conceptual foothold to get me started
I need to see lots of examples, practice them myself, and obtain rapid feedback
I need to have some modest stress
I need to apply the learning repeatedly over long periods
I need to accept that sustained learning requires multiple exposures
I have to memorize key ideas and concepts
I need to develop an internal model
I have to want to learn a topic.
Learning a new thing I want to learn can be challenging. However, it is perhaps not surprising that learning a new thing I don’t want to learn is really, really hard. My strategy: If there is a topic that I’m being “forced” to learn (e.g. some kind of required training), I pretend I want to learn it. Like many undergraduates, I had to take many classes (usually General Education courses) that I really didn’t want to take. But once enrolled and attending, I made every effort to try and learn the new topic as if I wanted to learn it. This shift in attitude made all the difference in my enjoyment of the course and my ability to learn the content. Eventually, the sentiment becomes genuine and one really does want to learn the new topic. This happened to me during an American History class in my senior year of college. I ended up having to take it based on the GE options available. But I kicked into this mode I described and really ended up enjoying it. Another more recent example are these State-mandated sexual harassment sensitivity trainings we must do every couple years. They aren’t exactly convenient to do and can be much longer to take than you expect. It is natural to start resenting them. However, by popping into my “pretend like I want to learn this” mode, they actually become quite interesting and informative.
I have to be engaged in the learning process.
Engagement strategies come in several forms for me:
Paying attention
Taking copious notes and drawing pictures
Making connections between ideas and to things I already know
Asking questions
Reviewing and repeating the content
Memorizing key elements
Here’s one strategy I use. I don’t just asking questions as they come up, but actually actively think of questions to ask. That is, even if I don’t think I have questions I still think of some to ask and write them all down in my notes with a “Q*” (circled) in the margin. By doing this, with feedback, I learn what a “good” question is for a given topic and what a “silly” question is. The idea that “there is no such thing as a bad question” is simply incorrect. There are “good” questions and “bad” questions. However, part of learning a new topic is to learn what the good and bad questions are. This means asking lots of bad questions. A better way of turning around that education trope would be “you will ask bad questions when you are learning something new, and that’s ok, even encouraged.” To a point. There is a pivot where asking lots questions becomes an attention-seeking exercise and wastes other people’s time, particularly in a classroom setting. So there is a balance. Sometimes just writing the question down and seeing if the education process answers it naturally is the best thing.
In contrast to some common active learning activities in modern pedagogy, I don’t usually benefit from talking to others who are also learning the topic (e.g. peer instruction, think-pair-share, etc.). That activity is helpful for morale (e.g. realizing others are confused too), but it doesn’t seem to help with my learning. What tends to happen is that we reinforce each others’ misconceptions and walk away thinking we know more than we do. It can also reinforce a sense that “we are all confused, so the instructor must be screwing up.” Talking with an instructor directly is a different matter and that can be very helpful.
I have to find an intellectual or conceptual foothold in the topic.
I have to get an early confidence boost by feeling like I understand one little, tiny thing then building on it. My own strategy is finding analogies with things I already understand, but this has to be done delicately. One bad analogy can set the learning process back. This tiny thing is often a weird, special case of some concept. What works as a foothold for me isn’t always easy to anticipate. Frequently, it is an example that an expert would almost feel bad presenting because it doesn’t portray the entire picture and is too simplified. It might even be something an instructor would regard as so self-evident as to not even be worth mentioning. It can be a vapor-thin analogy or some very simple way to appreciate some concept. It can sometimes be in the form of understanding the cultural landscape of a topic: “experts think of this idea in this way,” providing a heuristic, bird’s eye view of the concept. Connecting back to the memorization and repetition theme above, it can mean simply knowing what some new vocabulary word means and how to use it in a sentence! Yes, that basic!
With a foothold, even if somewhat trivial, the seeds of understanding start to bloom. Note: One can’t stick to the simple, heuristic version forever, but a foothold is essential for me to start.
I have to see a lot of examples then be able to try it myself with rapid feedback.
Coupled to the foothold is the well-crafted example. My strategy is to seek such examples. A few completely worked examples that build in complexity are really important to me as I learn new things. It can take a rather abstract idea and solidify it very quickly. Yes, the understanding gleaned from an example may be superficial by the standards of an expert, but for me-as-the-student these baby steps are super important. After seeing a few examples, I need to try it myself then get instant feedback about how I did. This procedure of seeing a well-crafted example, trying it myself, then getting feedback basically needs to be repeated in some form or another.
I have to have a learning context that has the right balance between stress and leisure.
If my motivation to learn is entirely carefree and leisurely, I’ve found my ability to learn is softened quite a bit. I might be entertained, but I won’t really learn anything. My strategy is to come up with a reason to learn something. Sometimes this isn’t hard because I legitimately have to learn something. However, even just having a certain personal drive to learn something new can be sufficient to motivate — but there has to be some intensity to the experience, even if internally (“artificially”) generated. But too much stress is a serious problem. If I feel that I “must” learn it, feel like I’m having to cram for some reason, or that a lot is at stake for some reason, my own thinking gets very clouded and the whole learning process gets damped.
I have to repeat and practice the modest skills I’ve built over a long period of time.
I can’t really learn something on first exposure. For me, sustainable learning and mastery is iterative. I pretty much have to apply any new knowledge I learn on a regular basis to retain it. The old “use it or lose it” platitude is basically true. This isn’t really a surprise. As a younger student, the half life of knowledge was longer. However, I think the fact remains that having to use what I learn allows me to retain the “I learned this” status.
Of course, the motivation for learning something new might not be to use it indefinitely. Having learned something, even in the short term, as a form of entertainment, can be rewarding. However, having learned something once, just reviewing it can be easy and lets me get back in the groove. Going back to the intellectual foothold point above: these footholds can serve as reentry points. They are like those little mnemonic boxes people use in their minds; they are little pointers to topics, rather than the topics themselves. With a simple conceptual trigger, a wide infrastructure of the original learning can reopen.
I have to (gasp) memorize stuff.
This is considered blasphemy in my field, but to learn something new I have to memorize a lot of patterns and repeatedly use them until I don’t have to think about them. This is so certain words and patterns become integrated with my thinking and are no longer some external thing I have to keep looking up, which slows things down. Even if I understand the concepts, having to stop and lookup/review “what does this symbol mean again?” is very distracting and bogs down ongoing mastery. This might include formulas, constants, vocabulary, graphics, sounds, etc. The memorization need not be active, but it might need to be at first. Yes, I can understand the concept of something without memorizing anything. But, sadly, just understanding the concept isn’t usually good enough to actually apply something I’m trying to learn. This flies in the face of the basic philosophy of my own field of study! Concepts rein supreme! In fact, it may even fly in the face of actual studies. But I have a hard time giving this up. I’m not saying that memorizing is the same as deep learning or “true understanding.” But it is essential for me if I want want to make progress and apply newfound knowledge.
I understand the concept of chess pretty intuitively, but could I really play it competently without knowing (without hesitation!) how the pieces move at a glance? No way. But make no mistake, just knowing how the pieces move isn’t mastery either. However, it is a necessary condition for mastery.
Without memorizing stuff, the learning process can evaporate quickly. As topics become more advanced beyond just the inspirational introduction, the information builds on itself. Without simply knowing what the words mean, it all becomes a firehose of vocabulary. If you want to think like an expert in that field, you have to know what the words and ideas actually are without hesitation.
It is easy to dismiss memorization and repetition as a pathetic crutch for the intellectually weak — this is easy to say if you already have the important things memorized! But if you are just learning something new, having a few key ideas memorized and internalized (ideas that you might not yet understand) can make the learning go so much faster.
Memorization isn’t understanding, but it can make the process of understanding so much easier!
I have to build an internal model.
This is really the culmination of all of the above. Eventually, the processes above align with my brain and I reach a certain level of mastery and learning. I have attained an internal way of thinking of it that maps directly onto the reality of the topic. It is difficult to describe an “internal model.” It is neurological. Internally, it is qualitative and part of my qualia. Some set of ideas, words, concepts, applications, etc. that seemed unfamiliar are now familiar and can be applied to new things. It is a curious effect. The words and symbols that meant nothing last week now have some internal substance that can be manipulated in a meaningful way. It is quite satisfying. My ultimate test to see if I’ve learned a topic is to see if I can apply it to something new. More frequently than not, I’m disappointed in my inability to do so at a level I would like. It is humbling, but a nice check. Learning and mastery are ongoing experiences, usually lifelong, and it should be no surprise that innovations and creative problem solving don’t come quickly.
So, that’s a very rough outline about how I tend to learn things. I’ve certainly forgot many other factors. Also, I’ve probably overstated and understated some of the ones above. In any case, hopefully I’ve left you with some food for thought: how do YOU learn new things?
Number sequence puzzles are a problem solving staple. There are obvious ones, obscure ones, and famous ones like the Fibonacci sequence. I assert that given a few numbers (say 5 or 6) in a sequence and asked to identify “what is the next number?” there is a way to solve it that won’t generally involve the intended solution, but will nevertheless aways be right. But it is sort of cheating. No, take that back. It is cheating.
The trick is to find the (first appearance of the) sequence you seek in the digits of pi or any other transcendental number like e, phi, or pick your favorite. You can then read off the remaining digits using some convenient grouping to fill out the sequence to arbitrarily large values of necessary. Frequently, unless you have pi memorized to hundreds of thousands, millions, even billions of digits, this will require a program or online resource of some kind to find the sequence in the digits of pi.
Let’s do some examples. Take a few number series puzzles from dailybrainteaser one of many such fun puzzle sites:
What is the next number in this series?
6, 14, 36, 98, 276, ?
First, we look for the pattern 6143698276 in pi using, The Pi-Search Page, or Irrational Numbers Search Engine. The former does a fast, as you type, search over the first 200 million digits while the later does a deeper search out to 2 billion digits (these are just a couple of many sites available). As any small child can see, 6143698276 appears at the 1,962,082,153th digit of pi. A few of the digits after that look like: 614369827631848334. One can then casually claim something like: “the next number in the sequence 6, 14, 36, 98, 276 is 318 where 318 is (obviously) the next three digits after 6143698276 starting at the 1,962,082,153th digit of pi. Bam!” Mike drop. No argument.
As the given sequence gets longer, the less likely one will find the sequence in a transcendental search engine assuming such numbers are essentially a random distribution. For example, the sequence 6143698276 doesn’t occur in the first two billion digits of e or sqrt(2).
Here’s another:
What Comes next in sequence
1 , 4 , 5 , 6 , 7 , 9 , 11 ?
This one’s easy because it is relatively short. The pattern 14567911 appears at the 64,362,285th digit of pi. The few digits after it are 1456791122892. So, with great confidence, you can say “the sequence is obviously 1, 4, 5, 6, 7, 9, 11, 22.” Repeat argument above. End conversation awkwardly.
I appreciate this is quite gimmick-y. One can invent any number of arbitrary solutions to these sequence puzzles. Even for this approach, there will be multiple perfectly correct solutions, even just using pi alone. For example, in our second example above, 14567911 appears an infinite number of times in pi. Puzzles of this kind optimally involve a very specific elegant solution that uses your Puzzler. Nevertheless, this approach is amusing for the first couple times, lets you get your geek out, and can at least temporarily distract family and friends while you really try to solve the puzzle.
I was recently promoted to full Professor of Physics at Cal Poly. I joke that, nearly 50, I’ve finally grown up and got a real job. This was roughly a thirty year project from starting my freshman year as a physics major at San Jose State in 1986, through my masters degree, through my Ph.D. at UC Davis, through three postdocs, through a tenure-track probationary period at Cal Poly, through a tenured Associate Professor position, until finally as a full Professor in the fall of 2016 at Cal Poly.
In my case for promotion, I had to submit a teaching philosophy, which I would like to share here. The ideas in it are not new; I don’t claim to have invented them. Moreover, they are not cited because, in some ways, they are rather ordinary, blending into the background mythology of teaching culture. However, I feel that the particular personal way I have presented the ideas is perhaps worth sharing. The essence can be summarized as this: “Like I began, I have applied my own teaching principles to my own journey in learning how to teach.”
Statement of Teaching Philosophy
In my nine years at Cal Poly, I feel I’ve grown as a teacher and mentor. However, this newfound wisdom also makes me question my own growth; I now know how little I know whereas, when I started, I thought I had it all figured out. As someone not formally educated in Education, here are some of the things I’ve learned.
I believe education is important, but its success and purpose are difficult to quantify.
I believe education is important, but its success and purpose are difficult to quantify. In education, success and purpose can become a tautological exercise where one begins defining accomplishments in terms of what one is accomplishing. This is not unlike adding items you have already completed on a to-do list then immediately checking them off to feel productive. There are many sensible metrics of education effectiveness, but most are of a specialized nature or difficult to identify. Like Heisenberg’s celebrated Uncertainty Principle, it seems that the more specific a metric of one educational success is, the more uncertain is its ability to measure another aspect of success. In my own teaching and mentoring in physics, this abiguity has driven me to reflect on the purpose of our curriculum and focus on what we want to achieve and how to measure it. Nevertheless, I believe that education generates understanding of the world, removes ignorance, and allows us to face the future with courage and dignity.
Education generates understanding of the world, removes ignorance, and allows us to face the future with courage and dignity.
But setting aside abstract philosophies of education, my conclusion is that a successful education is one where a student discovers their own definition of success and develops the skills to pursue it. My particular specialty is physics, but I’m also human. If I facilitate this process by providing some skills and focus though my physics and my humanity, both in and outside the classroom, then I have been a successful teacher and mentor. I have helped guide many students through the struggles of the technical, day-to-day details of coursework, mentored them as they find their career path, and consoled them in their struggle to find out who they are as a person.
A successful education is one where a student discovers their own definition of success and develops the skills to pursue it.
Helping physics students find their own definition of success and finding the corresponding skill set to accomplish this has been challenging for me. But it is a challenge I have committed my life to and embrace with aplomb. In physics, one of the biggest barriers to promoting student success is also one of its greatest strengths: physics is both very generalized and yet fundamental by nature. Physics involves scientific ideas spanning about 30 orders of magnitude in space and time – from the quantum world to the cosmos and everything in between. It is a daunting task to prioritize these ideas for undergraduates and generate practical skills while also imparting rigor, problem solving, and deep understanding of fundamental concepts about the nature of reality. In my own work, I continue to experiment with different teaching styles and techniques, but have settled into what might be called the “traditional method” of lecturing enthusiastically at a board with chalk, asking them questions in class, giving regular exams and quizzes with quick feedback, and being available to students in and out of class, either online or in person. This path has allowed me to optimize my own ability to convey to students my enthusiasm for physics and to coach them in a positive, constructive way through the learning process. Feedback from students indicate they genuinely appreciate this.
Being satisfied and fulfilled as an teacher is a critical part of the student’s success and learning process.
Being satisfied and fulfilled as an teacher is a critical part of the student’s success and learning process. An empowered instructor is one who feels they are making a difference. An instructor driven far outside their comfort zone will not facilitate student success. If an instructor’s enthusiasm is suppressed, both instructor and student will suffer. Nevertheless, a teacher should be flexible and encouraged to experiment with different teaching methods while innovating, but they should also settle into a style that is most comfortable for them without becoming complacent or without compromising intellectual integrity. Because I’ve found my comfort zone, this also creates a positive learning environment for the students. They trust me to guide them on the intellectual journey because of the friendly confidence I try to convey.
The future will always require good teachers to engage and inspire students face-to-face.
The future will always require good teachers to engage and inspire students face-to-face.In my option, teaching and learning cannot be completely emulated with computer algorithms, online courses, or simply reading about a topic at home. Yes, all of those things can augment a learning experience but, until the invention of neural implants, which instantly inject knowledge, experience, and mastery directly into the human brain, interaction with a human teacher is necessary for deep learning. While I do add some elements of technology to my courses and mentoring, I try to learn everyone’s name and treat them as a coach would treat a team: we are all in it together and let’s try to win this game together. In this context, it gives me a chance to connect more with students inside and outside the classroom and give them very personalized feedback. Grades are not given as an authoritative effort to control, rather a genuine source of assessment that helps them improve their mastery. I aim to allow students to make mistakes and learn from them without feeling like they are a failure.
A teacher gives a student a foothold into a complex topic and helps them initiate the learning process.
A teacher gives a student a foothold into a complex topic and helps them initiate the learning process. A subject like physics is overwhelming – to try and learn it from scratch without guidance would be an intimidating undertaking. Without this foothold, developing skills in physics would be quite challenging. But, like with any project, it is best to master it in small, digestible chunks. The teacher is one who has made the journey through the material and can break the material into the right-sized pieces. I try to take the perspective of the student, remembering what is like not to know something, and then convey the concepts that allowed me to make the transition to an expert. I reenforce this by giving many content-rich homework and content-rich take home exams in addition to challenging in-class exams.
A teacher can facilitate learning and guide the process, but cannot be responsible for it.
A teacher can facilitate learning and guide the process, but cannot be responsible for it. A topic cannot be mastered in a single course. It takes repeated exposure to a topic over many years to begin to develop a meaningful understanding of something new. Learning a topic is a complicated undertaking. How much one has learned may not be realized for weeks, months, or even years after being exposed to it. Sometimes learning happens actively and voluntarily, but it even happens passively and involuntarily. To ask students right after a course “how much did you learn” is a meaningless question. Most instructors learn new things about material they have been teaching for decades. Given the students are the least qualified to assess their own learning, how could students possibly know how much they learned after a course if they have no baseline to compare it to? The adage “the more you know, the more you know how little you know” applies here. Similarly, akin to the Dunning-Kruger effect, “the less you know, the less you know how little you know.” This latter effect tends to breed overconfidence. A good teacher gives students a sense of a bigger world of knowledge, generating some self doubt, but without squelching enthusiasm to explore it further.
One role of a teacher is to, without sacrificing rigor, promote student satisfaction and to inspire students to learn more about a topic for the rest of their lives.
One role of a teacher is to, without sacrificing rigor, promote student satisfaction and to inspire students to learn more about a topic for the rest of their lives. In some ways, I value student satisfaction and the inspiration to continue their intellectual journey more than the content itself. In this respect, I try and provide the student with an educational Experience rather than just another class.
So, like I began, I have applied my own teaching principles to my own journey in learning how to teach. By doing so, I have learned how little I knew. I have defined my own success and pursued the skills to attain it. I have taken initiative in generating and expanding my own learning process. Without compromising rigor, I have also found satisfaction in the experience of teaching, inspiring me to continue learning about it the rest of my life. This experience, I hope, makes a difference to my students and allows them to find their own successful paths.

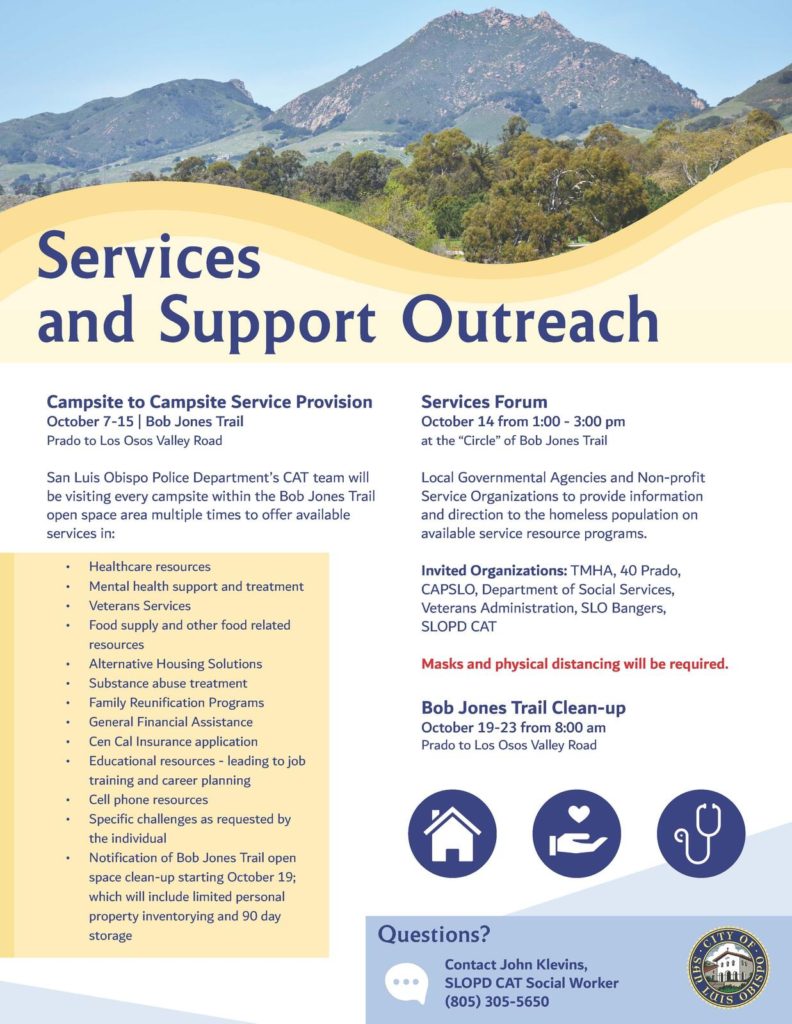

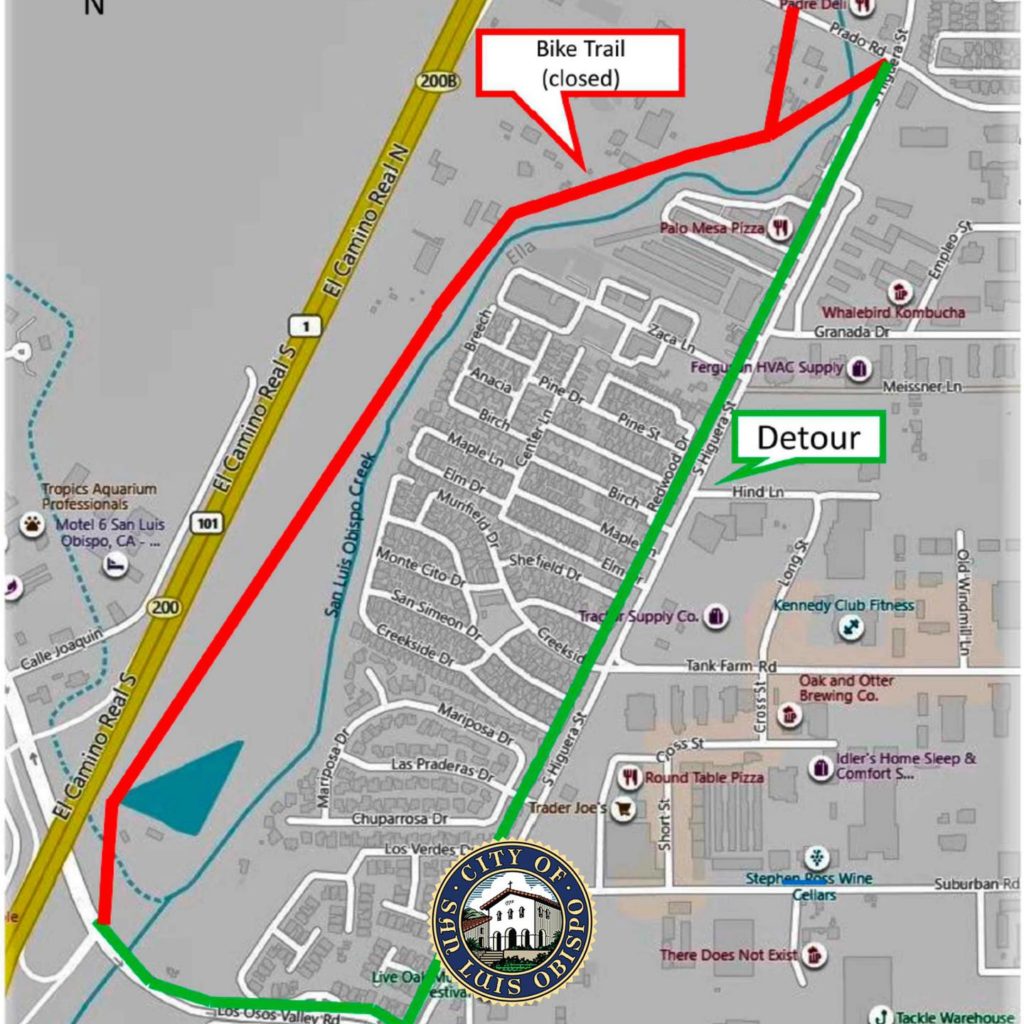


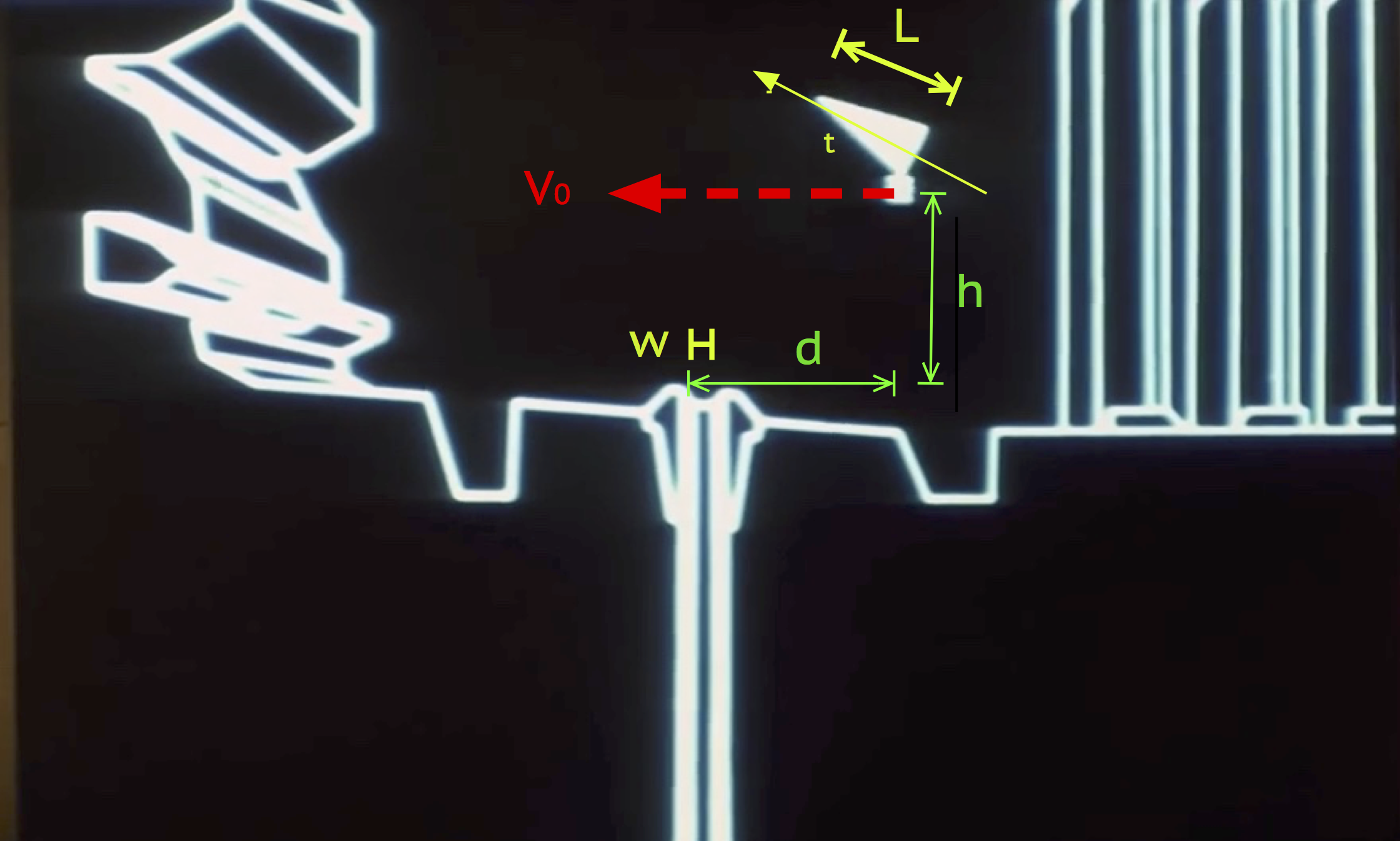


 = 0 degrees and h = d, the formula simplifies to
= 0 degrees and h = d, the formula simplifies to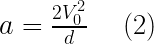 .
. .
.
 is the useful energy extracted from a mass
is the useful energy extracted from a mass  with efficiency
with efficiency  . The mass is converted to a volume using the density of the material.
. The mass is converted to a volume using the density of the material. required to accelerate an object of mass M to a light-speed fraction
required to accelerate an object of mass M to a light-speed fraction  at efficiency
at efficiency  .
.